Shared:Rhizome1Review2
Rhizome 1.0: Development of an Autarkic Design-to-Robotic-Production and -Operation System for Building Off-Earth Habitats
D2RP: 2nd session prototyping @Vertico


Prototyping notes:
Max Latour: https://docs.google.com/document/d/12zivUPcDOGN9cPNw7vGmF3cPtPncYAsNbaHbnJOm1FI/edit?usp=sharing
2nd review meeting
Agenda and notes:
https://docs.google.com/document/d/1MZabh1pjJLMHQWeRdA-MSApeLItCZ94CnQ9kKsV4trQ/edit and https://docs.google.com/document/d/1bV9a2l1aOQ-ESs25klxfKLmp2-8Le4HHEWspRI_ILzA/edit
Presentations:
Henriette Bier: https://drive.google.com/file/d/1N9KKgkLNqTBBuudFUNTTKA0YQqfa-J1z/view
pptx
Vera Popovich & Yinglu Tang: https://drive.google.com/file/d/1K0N2lT4E6srDrsO6_4P0NG_FdWlgYzrP/view
Luka Peternel & Armin Avaei: https://drive.google.com/file/d/1kb69e3wgKPp65-q33KKxTgQkPy4mZzWC/view
pptx
pptx
Roland Schmehl: https://drive.google.com/file/d/1T5oFE03QeaNtXIUgje5JCSe9RTjPR5kY/view
pdf
Angelo Cervone: https://drive.google.com/file/d/1FZGVac8F1agdqGmSHrJMquVHejJbyFHe/view
pdf
Deliverables T0+4:
D2&3 D2RP: https://drive.google.com/file/d/1SFczWsaZN3sOrj5yUQTZxFeKxLU0VI5N/view (PDF)
D2&3 D2RP (appendix): https://docs.google.com/presentation/d/1tHFCSKI14wG1DPXZhUkpODqukF9c-3Bu/view (PPT)
D2&3 HRI: https://drive.google.com/file/d/1gwQfh1M--5sZGXUN-cAn3UbLcn1n9_u6/view?usp=sharing
D4 ES: https://drive.google.com/file/d/1TTkrRL4Yr2i78IiRUMGO42af6GxPLpIa/view?usp=sharing
D16 PR: https://drive.google.com/file/d/1EknTNKpifgc4E1wuXSV-E68WJLWinxC1/view
Documentation:
https://drive.google.com/drive/folders/1m7W3-Za45GHRoxPj2KVk4oXpgyq228as
References:
https://www.sciencedirect.com/science/article/abs/pii/S0012825220303342 (lava tubes size and morphology)
https://www.sciencedirect.com/science/article/pii/S0019103521003171?via%3Dihub (lava tubes shield from radiation)
https://www.sciencedirect.com/science/article/pii/S1674775517301622 (scanning)
https://cjme.springeropen.com/articles/10.1186/s10033-018-0267-9 (cable robots)
https://ieeexplore.ieee.org/document/8376287 (cable robots)
https://www.archdaily.com/966349/big-nasa-and-icon-reveal-3d-printed-research-habitats-for-mars (3D printing)
Davies, W. E. (1949). Features of cavern breakdown. National Speleological Society Bulletin 11: 34-35.
Davies, W. E. (1951). Mechanics of cavern breakdown. National Speleological Society Bulletin 13: 36-43.
White, E. L. and White, W. B. (1969). Processes of cavern breakdown. National Speleological Society Bulletin 31(4): 83-96.
White, E. L. (2019). Breakdown. In: Encyclopedia of Caves (ed. W.B. White, D.C. Culver and T. Pipan), 187-194. New York: Academic Press.
Waltham, T., Bell, F. G. and Culshaw, M. G. (2005). Sinkholes and subsidence: karst and cavernous rocks in engineering and construction. Berlin: Springer Science & Business Media.
ESA blog: https://blogs.esa.int/exploration/take-refuge-in-a-cave-on-the-moon/ (lava tubes)
ESA rovers: https://www.theregister.com/2021/02/26/esa_moon_rovers/?fbclid=IwAR0XOu3jJBF962t8dFZnxkT9jh-EX_iYz8gUIDYZWT5nKaAGx3cH2zNNAOw (in lava tubes)
ESA logistic lander: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/European_Large_Logistics_Lander (Moon)
ESA caves: https://www.esa.int/Enabling_Support/Preparing_for_the_Future/Discovery_and_Preparation/ESA_plans_mission_to_explore_lunar_caves, and https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/CAVES_and_Pangaea (exploration)
Human Robot Interaction
Carrying and placing the printed panels to form walls/ceilings:
Co-manipulation tasks (such as carrying and placing Voronoi panels) require human(s), robot(s) and the environment to come to contact with each other and form a tightly coupled dynamical system [1]. Within such Physical Human-Robot Collaborative (pHRC) tasks, trajectory corrections are often frequent and necessary due to the robot’s lack of a higher-level understanding of human actions. Humans often demonstrate diverse behaviours due to their personal preferences, for instance related to their individual execution style or personal margin for safety. If the robot can gain an understanding of such user preferences, then it would be able to considerably improve its collaborative behaviour for different scenarios, reducing the need for additional corrections or adaptations.
In the proposed framework, the robot learns a context aware human trajectory preference model via coactive learning [2]. Based on a few initial demonstrations the robot updates the weights in its trajectory preference model that correspond to the features (i.e. preferences) the user intends to change. Prior to each collaborative episode, the robot combines its own objective function and the preference model to plan its behaviour in a way that adheres to both task requirements and user preferences (via trajectory optimization). Finally, a hybrid force/impedance controller [3] is used to track the resulting trajectory and force behaviour.
Preliminary results from simulations (Fig. 1) show that the robot is capable of generalizing the learned preferences to new scenarios, eliminating the need for repeated demonstrations. Furthermore, the framework is expected to achieve improved collaboration and to decrease effort from the perspective of the human partner. In the next steps, the method will be going under further development to include more preferences, and consequently will be tested on a real robot platform in a physical human-robot collaborative manipulation task.
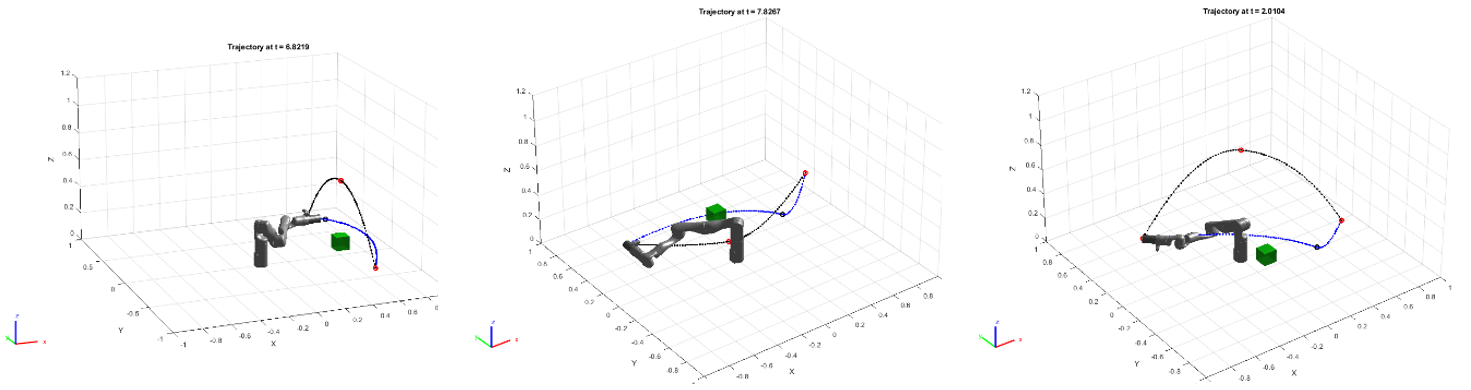
Figure 1: Top: User demonstrates their preferences of staying close to the ground surface and passing on the right side of obstacles in the learning phase. Bottom: The robot generalizes and executes trajectories that adhere to the user’s preferences in different scenarios.
References:
[1] Arash Ajoudani et al. “Progress and prospects of the human–robot collaboration”. In: Autonomous Robots 42.5 (2018), pp. 957–975.
[2] Ashesh Jain et al. “Learning preferences for manipulation tasks from online coactive feedback”. In: The International Journal of Robotics Research 34.10 (2015), pp. 1296–1313.
[3] Peternel, L., Tsagarakis, N., Caldwell, D. and Ajoudani, A., 2018. Robot adaptation to human physical fatigue in human–robot co-manipulation. Autonomous Robots, 42(5), pp.1011-1021.
Dissemination
Media habitat:
Universe Today: https://www.universetoday.com/151244/swarms-of-robots-could-dig-underground-cities-on-mars/
Phys: https://phys.org/visualstories/2021-05-swarms-robots-underground-cities-mars.amp
Uncover reality: https://theuncoverreality.in/2021/05/28/swarming-robots-3d-printed-habitats-will-play-a-key-role-in-an-underground-city-on-mars-engineering/
Syfy: https://www.syfy.com/syfywire/humans-could-be-living-underground-on-mars
Copernical: https://www.copernical.com/news-public/item/24156-2021-05-21-17-55-37
Impact lab: https://www.impactlab.com/2021/05/27/swarms-of-robots-could-dig-underground-cities-on-mars/
3D Print Magazine: https://3dprintmagazine.eu/tu-delft-en-vertico-willen-woningen-3d-printen-op-mars/
3D Printing Media: https://www.3dprintingmedia.network/tudelft-and-vertico-develop-3d-printed-underground-habitats-on-mars/
PopSci: https://www.popsci.com/space/robots-build-human-settlements-mars/
Public News: https://publicnews.in/science/robot-swarms-could-build-mars-shelters-underground-popular-science/
Stampare in 3D: https://stamparein3d.it/tu-delft-sviluppa-zebro-robot-di-stampa-3d-autonomo-per-habitat-sotterranei-su-marte/
3D Grenzenlos: https://www.3d-grenzenlos.de/magazin/zukunft-visionen/zebro-roboter-bauen-unterirdische-gebaeude-auf-mars-27716073
FBEN: http://fben.com/swarms-of-robots-might-dig-underground-cities-on-mars/
Les Actualités: https://lesactualites.news/technologie-et-science/des-essaims-de-robots-pourraient-construire-des-abris-sous-terre-sur-mars/
Germanic News: https://germanic.news/roboterschwarme-konnten-marsunterkunfte-unter-der-erde-bauen/
News opener: https://newsopener.com/science/robot-swarms-could-build-mars-shelters-underground-popular-science/
Okos ipar: https://www.okosipar.hu/hangyavarszeru-epitmenyekben-lakhatunk-a-marson/
Allesoverhr: https://www.allesoverhr.nl/themas/zestig-procent-van-werk-in-bouw-wordt-overgenomen-door-robots/
3D Natives: https://www.3dnatives.com/en/zebro-robots-to-use-3d-printing-to-colonize-mars-210620215/
FACFOX: http://m.insta3dp.com/news/tudelft-and-vertico-develop-3d-printed-undergr-49272913.html
Media kites:
Newscientis: https://www.newscientist.com/article/2276863-enormous-kites-flown-by-robots-could-help-power-a-mars-colony/
Journals:
Spool CpA 4: https://journals.open.tudelft.nl/spool/issue/view/787
Books:
AE 5 (work in progress): https://www.springer.com/series/15693